Module điều khiển động cơ l293d mạch điều khiển động cơ 1, module điều khiển động cơ l293d

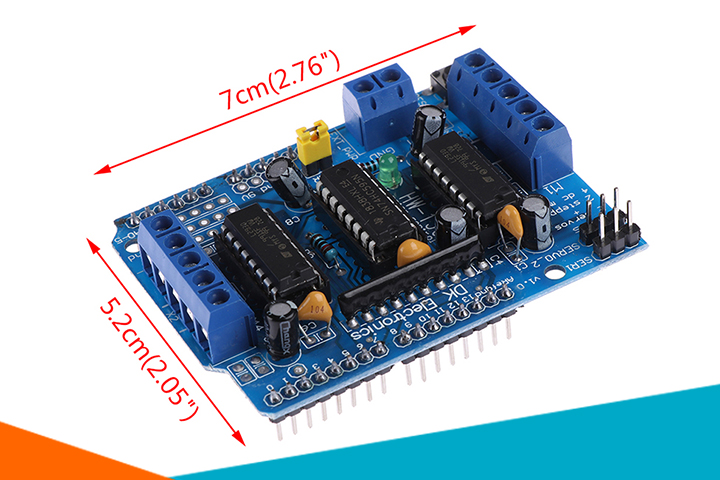
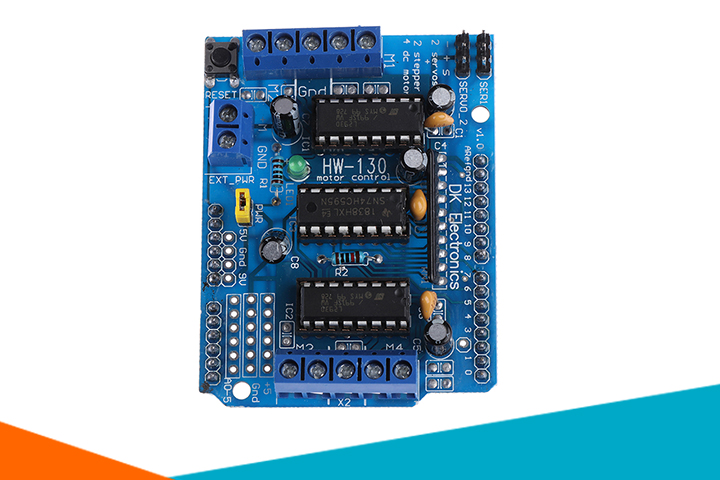
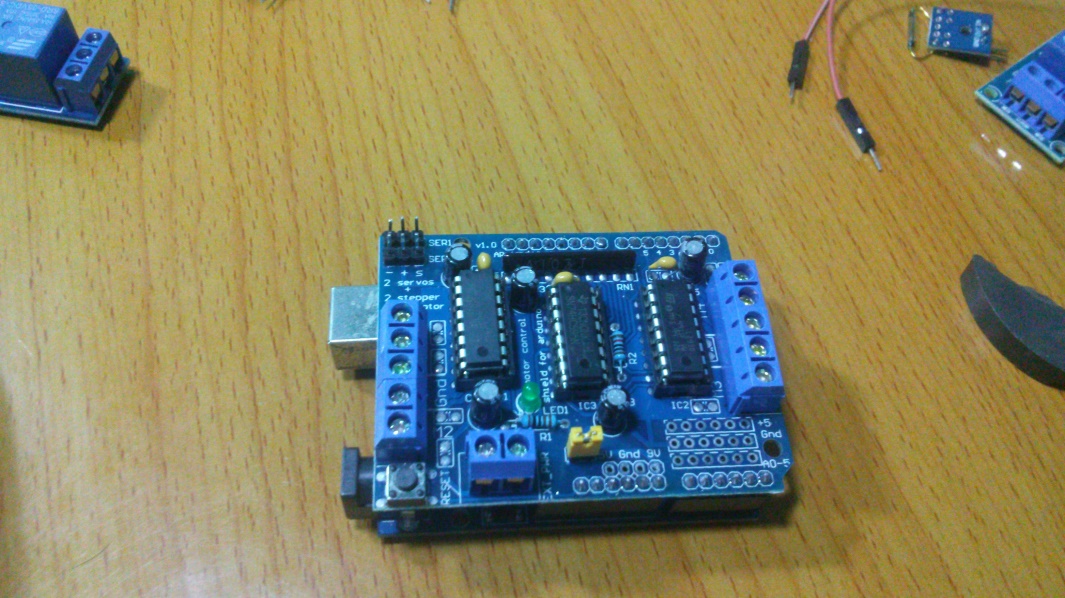
- Module Điều Khiển Động Cơ L293D - Arduino Motor Control Shield là một phần board không ngừng mở rộng cho những board arduino, dùng làm điều khiển các loại động cơ DC, hộp động cơ bước và hộp động cơ servo. Arduino Motor Shield có phong cách thiết kế gọn gàng, đẹp mắt và tương thích trọn vẹn với các board Arduino: arduino uno r3, arduino leonardo, arduino mega2560, giúp bạn có thể sử dụng và điều khiển và tinh chỉnh một cách thuận lợi và cấp tốc chóng.
Bạn đang xem: Module điều khiển động cơ l293d
-Module Điều Khiển Động Cơ L293D - Arduino Motor Control Shield sử dụng 2 IC ước H L293D hoàn chỉnh với các chế độ đảm bảo và 1 IC xúc tích 74HC595 để tinh chỉnh và điều khiển các cồn cơ.Arduino Motor Shield có thể điều khiển nhiều một số loại motor khác nhau như step motor, servo motor, motor DC, với khoảng áp lên tới mức 36V, dòng buổi tối đa 600m
A cho mỗi kênh điều khiển.

Cụ thể là tinh chỉnh và điều khiển được số lượng motor như sau:
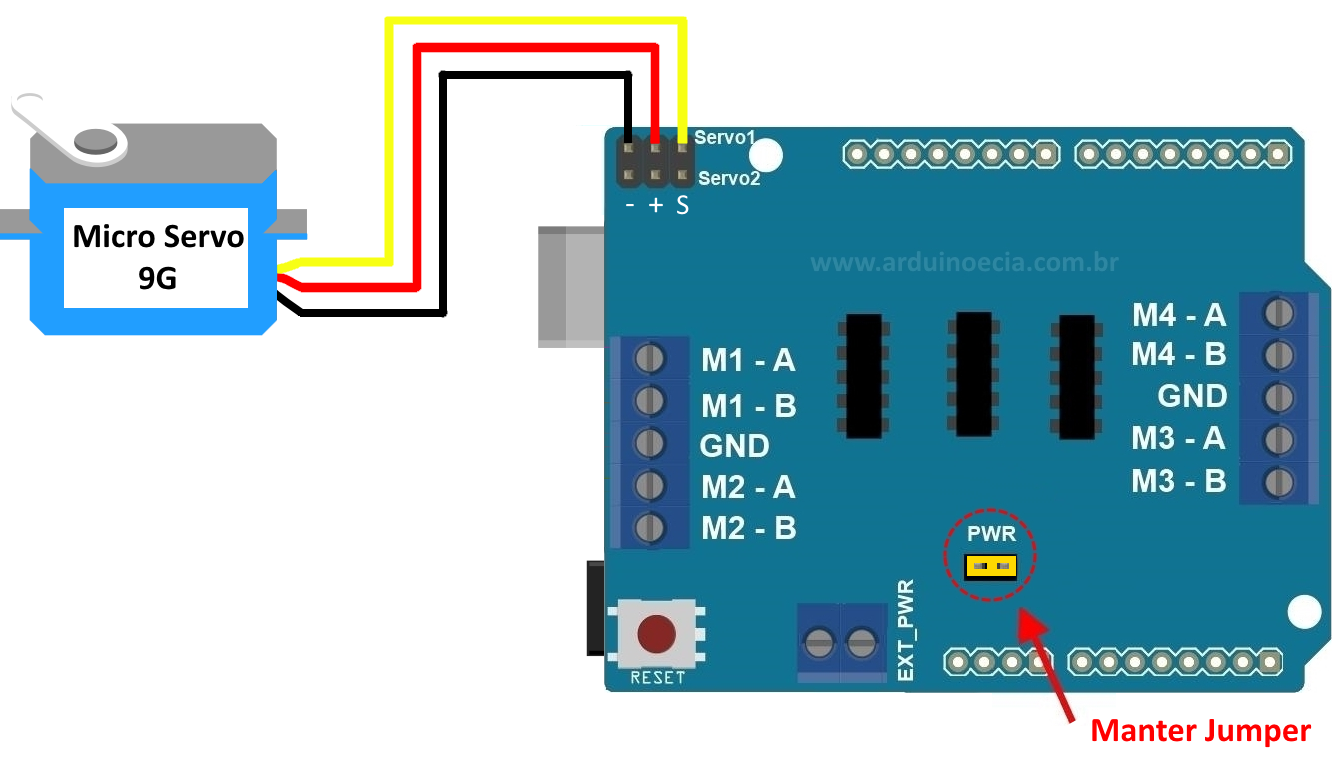
- 2 jack cắm tinh chỉnh và điều khiển 2 hộp động cơ RC servo.
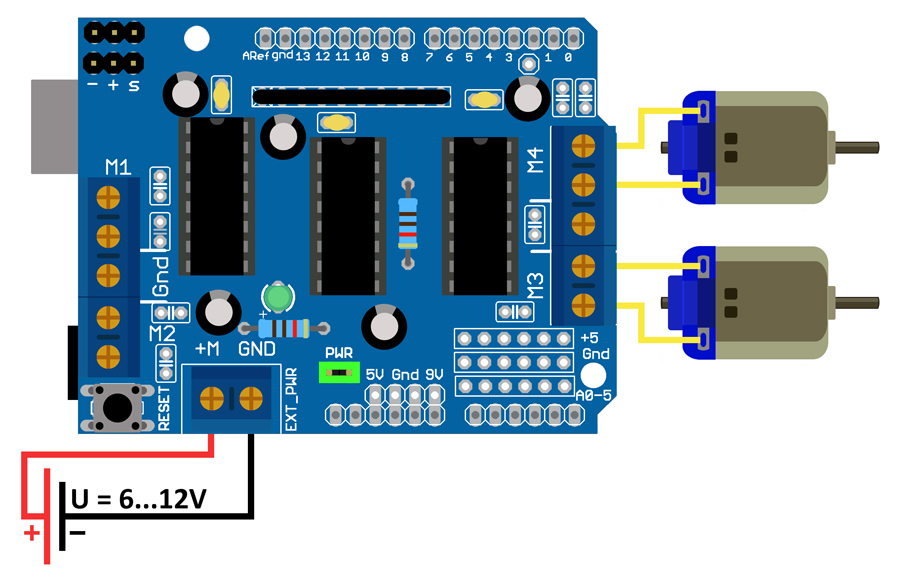
- 4 ngõ ra tinh chỉnh và điều khiển đến 4 động cơ DC độc lập.
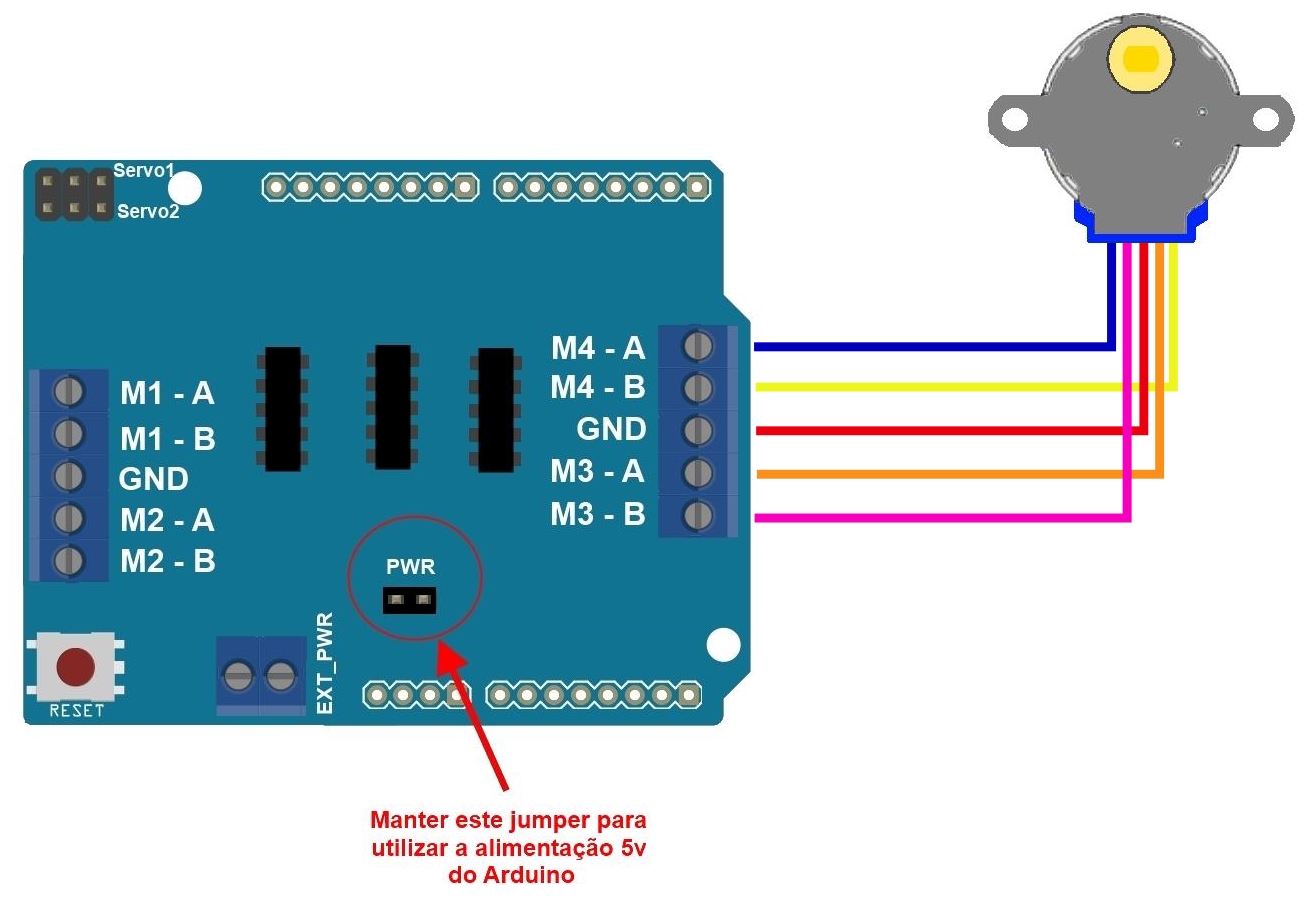
- 2 hộp động cơ step motor loại đơn cực (unipolar) hoặc lưỡng cực (bipolar)
- Mạch tích hợp năng lượng điện trở nối GND giúp cho không từ bỏ chạy khi khởi rượu cồn board.
Các chân mà lại Arduino Motor Shield sử dụng là:
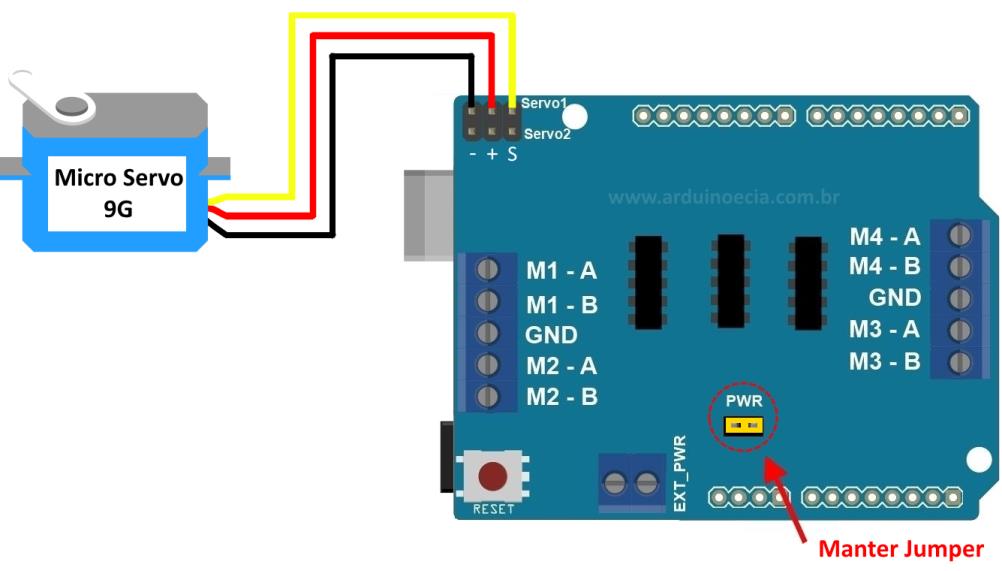
Chân tinh chỉnh và điều khiển 2 RC servo được kết nối với chân số 9 và 10. Nguồn cung cấp được mang trực tiếp tự board Arduino.
- Motor 1 nối với chân 11
- Motor 2 nối cùng với chân 3
- Motor 3 nối cùng với chân 5
- Motor 4 nối cùng với chân 6
- Chân 4, 7, 8, 12 dùng tinh chỉnh và điều khiển motor thông qua IC 74HC595
Ngoài ra để tiện mang lại việc áp dụng nguồn cắn ngoài, bên trên Arduino Motor Shield thực hiện 1 jumper PWR mục đích để mang nguồn ngoài thông qua jack DC của board arduino để hỗ trợ nguồn đến motor hoạt động. Ví như trong trường hợp họ không sử dụng jumper này thỉ phải cấp 1 nguồn riêng vào chân EXT_PWR để cấp nguồn đến motor hoạt động.

- Hàng luôn luôn được bình chọn kỹ trước khi giao yêu cầu lúc đặt đơn hàng khi nhận được hàng quý khách rất có thể kiểm tra nếu không vừa lòng có thể hoàn trả.
- hàng được đánh giá trực tiếp khi quý khách hàng mua mặt hàng offline.
- sản phẩm nếu bên trong danh mục bảo hành sẽ gồm tem ghi ngày bắt đầu và ngày kết thúc bảo hành trên sản phẩm.
Xem thêm: Cách Phối Đồ Với Giày Jordan 4 Nữ Chuẩn Như Fashionista Hàng Đầu
- Đối cùng với các thành phầm điện tử là module các loại, cửa hàng chúng tôi không có bao gồm sách bảo hành nhưng vẫn có đoạn phim test sản phẩm trước lúc giao cho quý khách.
Module tinh chỉnh động cơ
L293D
Module điều khiển và tinh chỉnh động cơ
L293Dlà Shield mở rộng cho Arduino, cân xứng với board Arduino Uno R3, Arduino Leonado, Arduino Mega 2560.
Module điều khiển và tinh chỉnh động cơ
L293Dsử dụng 2 IC mong H – L293D với 1 IC lô ghích 74HC595 điều khiển. Vì đó, shield này rất có thể điều khiển nhiều một số loại motor không giống nhau với mức năng lượng điện áp lên tới mức 36V, dòng buổi tối đa 600m
A từng kênh điều khiển.
Các thành phầnMotor Control Shield L293D Arduinocó thể điều khiển:
2 Động cơ Servo4 Động cơ DC (M1, M2, M3, M4) theo những hướng không giống nhau (mỗi motor hoàn toàn có thể quay với 1 hướng tiến/lùi bất kì phụ thuộc vào người dùng) trải qua 4 cầu H của 2 IC L293D cái 600mA (Cực đại 1.2A).2 Động cơ bước loại 1-1 cực (unipolar) hoặc lưỡng cực (bipolar).
Motor Control Shield L293D Arduinocó sẵn các điện trở nối GND nhằm mục đích tránh những motor từ quay thời điểm khởi cồn và nút RESET nhằm khởi động lại board Arduino nhưng mà nó đang cắn vào.
Các chân bên trên Shield được kết nối với board Arduino như sau:
2 dây điều khiển 2 Servo liên kết với chân số 9 cùng 10. Mối cung cấp nuôi lấy trực tiếp trường đoản cú board Arduino (nguồn 5V).Motor 1 nối cùng với chân 11.Motor 2 nối cùng với chân 3.Motor 3 nối cùng với chân 5.Motor 4 nối với chân 6.Chân 4, 7, 8, 12 dùng tinh chỉnh và điều khiển Motor trải qua IC 74HC595Các chân không sử dụng: 2, 13, A0, A1, A2, A3, A4, A5Trên Shield có 1 jump màu quà PWR được sử dụng: Nếu kết nối nguồn ngoại trừ cho board Arduino thông qua Jack DC (vd pin sạc 9V) thì mối cung cấp nuôi motor được lấy luôn từ jack này, không buộc phải nối mối cung cấp với EXT_PWR. Trường hợp ngắt jumper, bạn cần nối mối cung cấp riêng vào EXT_PWR để nuôi Motor.
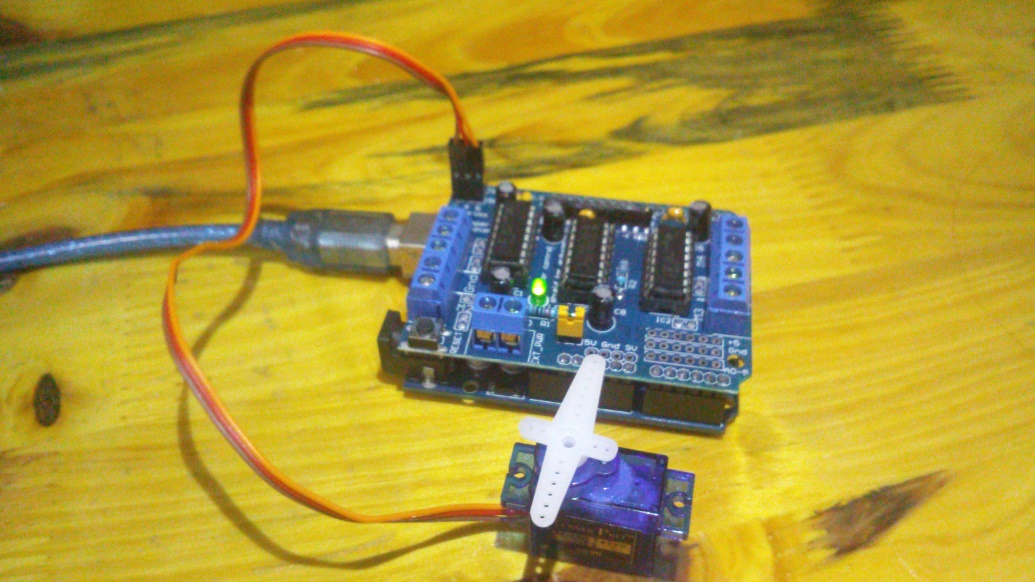
Dưới đấy là chương trình thực hiện Arduino Uno R3 vàMotor Control Shield L293D Arduinođiều khiển động cơ DC trên kênh m2 và Động cơ Servo:
Trước tiên các bạn download và thiết lập thư việnAFMotor.https://www.mediafire.com/?19plr0lzhcdx4yc
Điều khiển Động cơ DC:

#include AF_DCMotor motor(2, MOTOR12_64KHZ); // tạo hộp động cơ #2, 64KHz pwm void setup() Serial.begin(9600); // mở cổng Serial monitor 9600 bps Serial.println("Hello my racing"); motor.set
Speed(255); // chọn vận tốc maximum 255`/255 void loop() Serial.print("tien"); motor.run(FORWARD); // bộ động cơ tiến delay(1000); Serial.print("lui"); motor.run(BACKWARD); // động cơ lùi delay(1000); Serial.print("tack"); motor.run(RELEASE); // dừng hộp động cơ delay(1000);Điều khiển Động cơ Servo:
Trên Sheild có 2 vị trí nhằm nối tương xứng với 2 Servo, cắm đúng trang bị tự GND(-), VCC(+), Signal(S).
#include #include int i;Servo servo1;void setup() Serial.begin(9600); // mở cổng monitor 9600 bps Serial.println("Test servo!"); servo1.attach(9); // Khai báo chân servovoid loop() { for (i=0; i
Từ lí giải trên các chúng ta có thể phát triển thêm để tạo nên mình 1 dự án thật sáng tạo và độc đáo.









